| LSD | 您所在的位置:网站首页 › ros 建图 › LSD |
LSD
|
LSD (LiDAR SLAM & Detection) 是一个开源的面向自动驾驶/机器人的环境感知算法框架,能够完成数据采集回放、多传感器标定、SLAM建图定位和障碍物检测等多种感知任务。 在上一篇发布的文章中,我们大致介绍了LSD的一些基础内容。本文将详细讲解LSD的系统框架,以帮助研究人员进一步了解LSD的结构和功能。 背景自动驾驶/机器人环境感知区别于PNC (Planning and Control)模块,环境感知通常需要处理多个高线数激光雷达和相机传感器数据,其特点在于点云和图像的数据量非常大,比如一个128线激光雷达,每秒产生约20MB点云数据(x, y, z, intensity),一个1080P@30FPS相机,数据量可达到每秒约180MB。 在自动驾驶领域,ROS(Robot Operating System)是一个经常被研究者们用于开发实现各类算法的基础框架,我们知道,ROS1是一个分布式框架,每个模块之间都是一个个独立的进程,为了实现各模块之间的数据通讯,ROS1设计了一套完整的通讯机制(例如ros topic, ros service等),其底层协议则采用了TCP/UDP协议,当传输点云或图像数据时,ROS框架内部会存在大量的数据拷贝、分包转发等处理,从而可能导致出现消息延迟等问题。 因此,为了减轻上述问题以提高系统实时性,LSD在实现时并未采用ROS框架,而是将所有传感器数据由一个主进程(内部创建一些子进程)来统一管理,在结构上采用可配置数据管线(类似于gstreamer/ffmpeg等多媒体框架)和消息发布订阅机制来灵活实现数据交互。以下是与ROS的一些方面的对比: LSDROS1编程语言Python3/C++(pybind11)C++为主/python2.x整体结构主进程调用各个模块Init、Start、Stop。数据流:传感器数据 -> 算法模块(检测、定位)-> 输出模块分布式,每个模块一个进程(由roscore分发数据)数据交互同一进程直接访问(无拷贝),子进程(pickle序列化)序列化为类C结构字符串,XMLRPC,走TCP/IP协议栈(数据需要拷贝和分包)消息机制采用ZeroCM第三方库实现,用于少量的消息发布和订阅ROS Topic远程调用采用ZeroRPC实现,主要用于Web可视化ROS Service可视化基于Web开发的预览页面和TVizRViz由于LSD整体由Python3和C++实现,不基于ROS系统,因此具备较好的可移植性,能够运行在各种存储容量较小的嵌入式设备上。下面将详细介绍“可配置数据管线”和“消息发布订阅”机制。 可配置数据管线该框架主要用于点云、图像等数据量较大的传感器数据处理,在使用方式上,可以通过配置文件来灵活实现各个模块之间的数据交互。 在LSD内部实现了以下几个基础模块:Source,Detect, SLAM, Sink和Common,由ModuleManager统一管理。层次结构如下图所示: 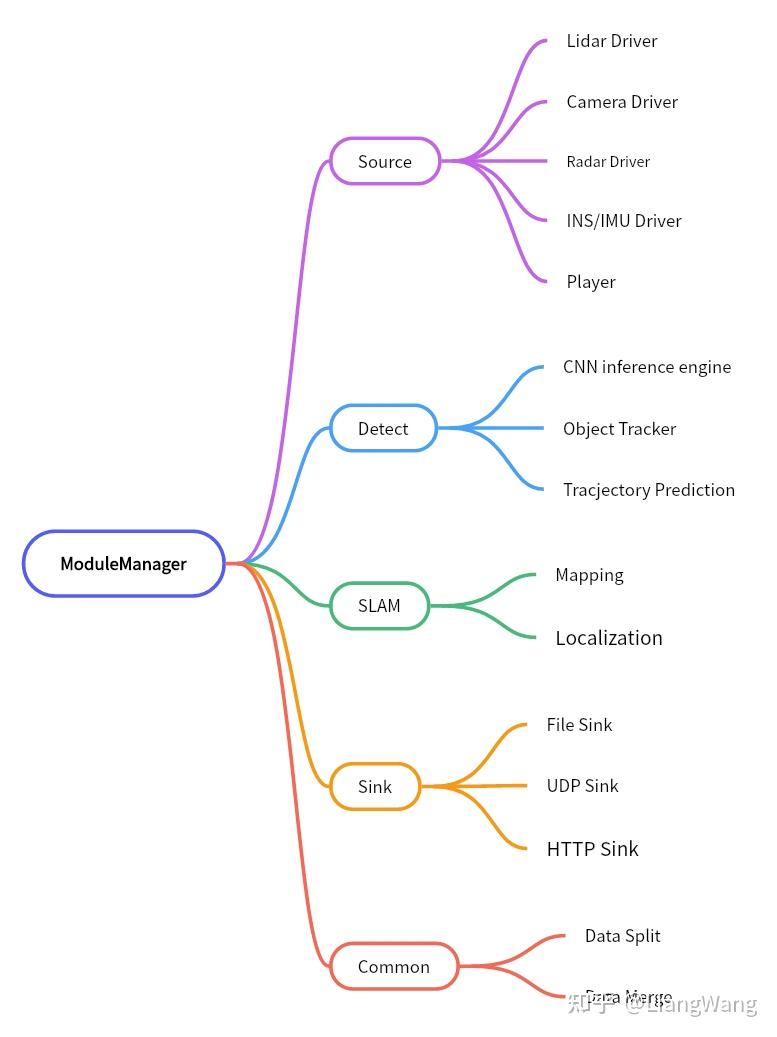 模块结构Source管理各个传感器输入数据解析、同步等。Detect / SLAM作为中间模块处理传感器数据并输出目标检测结果和建图定位结果。Sink接收上游数据并通过UDP/HTTP协议输出或写入磁盘。Common用于数据分割和合并操作。 模块结构Source管理各个传感器输入数据解析、同步等。Detect / SLAM作为中间模块处理传感器数据并输出目标检测结果和建图定位结果。Sink接收上游数据并通过UDP/HTTP协议输出或写入磁盘。Common用于数据分割和合并操作。LSD可以通过配置文件来控制上述各个模块的连接关系,从而实现多种工作模式。例如:数据采集模式的数据管线为:Source -> Sink。而目标检测模式则配置成:Source -> Detect -> Sink。可配置数据管线框架的具体实现代码位于lidar-slam-detection/module目录下。 消息发布订阅机制LSD主要以可配置Pipeline的结构运行,在此基础上,增加部分消息发布订阅机制来提高框架的灵活性。LSD基于ZeroCM第三方库实现了基础的消息发布订阅功能。 ZeroCM发源于LCM项目,主要区别在于增加了UDP Multicast/IPC等底层通讯协议。LSD基于ZeroCM的Type System定义了多个与ROS中相似的消息类型: 基本消息std_msgs::Byte,std_msgs::String,std_msgs::Int32,std_msgs::Int64,std_msgs::Float Geometry消息geometry_msgs::Point32,geometry_msgs::Quaternion,geometry_msgs::Vector3,geometry_msgs::Point,geometry_msgs::Pose,geometry_msgs::PoseStamped,geometry_msgs::Twist,geometry_msgs::PoseWithCovariance,geometry_msgs::TwistWithCovariance Nav消息nav_msgs::Odometry,nav_msgs::Path Sensor消息sensor_msgs::PointField,sensor_msgs::Image,sensor_msgs::CompressedImage,sensor_msgs::Imu,sensor_msgs::NavSatStatus,sensor_msgs::NavSatFix,sensor_msgs::PointCloud 以下是sensor_msgs::Imu的定义: package sensor_msgs; struct Imu { .std_msgs.Header header; .geometry_msgs.Quaternion orientation; .geometry_msgs.Vector3 angular_velocity; .geometry_msgs.Vector3 linear_acceleration; }可以发现与ROS中定义的基本一致,方便熟悉ROS的开发人员可以快速上手。 上述所有消息的定义和源码位于lidar-slam-detection/sensor_driver/common_lib/logging/message目录下。 发布订阅LSD提供了一些宏定义函数来帮助开发者快速实现数据发布,例如只需通过下面几行代码就可以发布Imu消息: sensor_msgs::Imu imu_msg; imu_msg.header.stamp = timestamp; imu_msg.angular_velocity.x = gyro_x; imu_msg.angular_velocity.y = gyro_y; imu_msg.angular_velocity.z = gyro_z; imu_msg.linear_acceleration.x = acc_x; imu_msg.linear_acceleration.y = acc_y; imu_msg.linear_acceleration.z = acc_z; PUBLISH_MSG("imu_raw", imu_msg);消息的订阅则可以通过回调函数来实现: class Handler { public: ~Handler() {} void handleMessage(const zcm::ReceiveBuffer* rbuf, const string& chan, const example_t *msg) { // process message } }; Handler handler; std::shared_ptr core = create_core(); core->subscribe(CHANNEL, &Handler::handleMessage, &handler); core->start();常用消息格式转换LSD提供了一些基础转换函数,可以轻松地将PCL PointCloud与sensor_msgs::PointCloud互相转换、OpenCV的cv::Mat和sensor_msgs::Image相互转换等。 TVizTViz是LSD包含的一个基于Web实现的3D可视化工具(类比与RViz),可以用于实现点云/图像/轨迹等各种消息的订阅和显示。使用方式简单: 在启动LSD之后,只需要打开浏览器访问http://localhost/tviz (若本机80端口占用,则访问http://localhost:1234/tviz)即可使用Tviz:  TViz TViz相比于RViz, TViz集成了曲线图显示功能,通过右键选中的message弹出对话框,选择需要绘制曲线的x轴和y轴数据即可。 总结本文介绍了LSD的系统框架实现背景和方案,使读者更好的理解和使用LSD。大家有好的建议和意见可以在评论区留言。 |
【本文地址】